



Artificial Skin
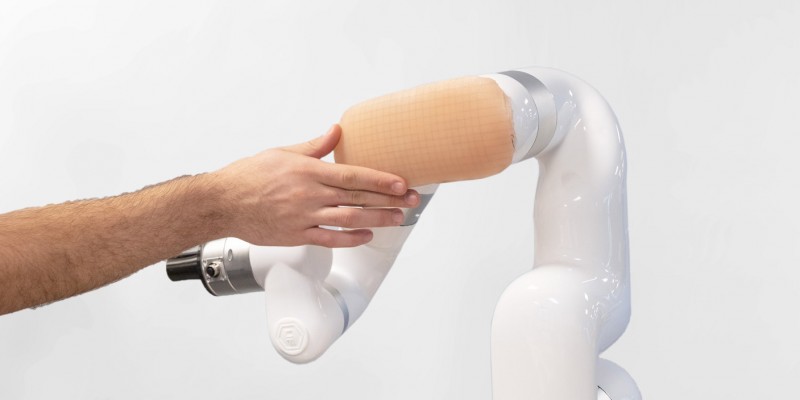
Prototype of artificial skin for HCI and Robotics applications
Currently the complete sensor cannot be bought on the website. We are commited to provide technical solutions for each specific use case.
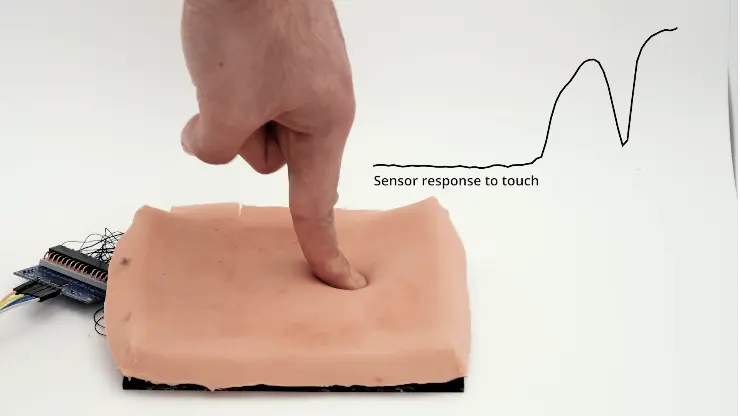
The sensor relies on the use of different silicone elastomers to replicate the human skin layers and comprises an embedded electrode matrix to perform mutual capacitance sensing.
This fabrication process has the advantage to encapsulate the sensing electrodes between different skin layers, ensuring robustness and durability.
About this product

Skin Sensor for Human-Robot Interaction and more
Designed to bridge the gap between technical capabilities and human factors, this sensor mimics the mechanical properties of human skin and excels in detecting precise touch.
Sensing Principle
The sensor operates on projected mutual capacitance, a standard in multi-touch technology. It measures touch by detecting local changes in capacitance on a grid array of conductive traces (electrodes). This method ensures accurate and reliable touch detection, essential for sophisticated human-robot interactions.
Sensor Fabrication
Utilizing advanced silicone elastomers to replicate human skin layers, the sensor embeds an electrode matrix for mutual capacitance sensing. This innovative fabrication process encapsulates the sensing electrodes within the skin layers, providing robustness and durability.
Perfect for Robotics Practitioners
- Research & Development: Ideal for enhancing physical human-robot interaction studies.
- Prototyping & Testing: Great for developing and testing new robotic applications.
- Educational Purposes: Perfect for academic institutions and robotics courses.